





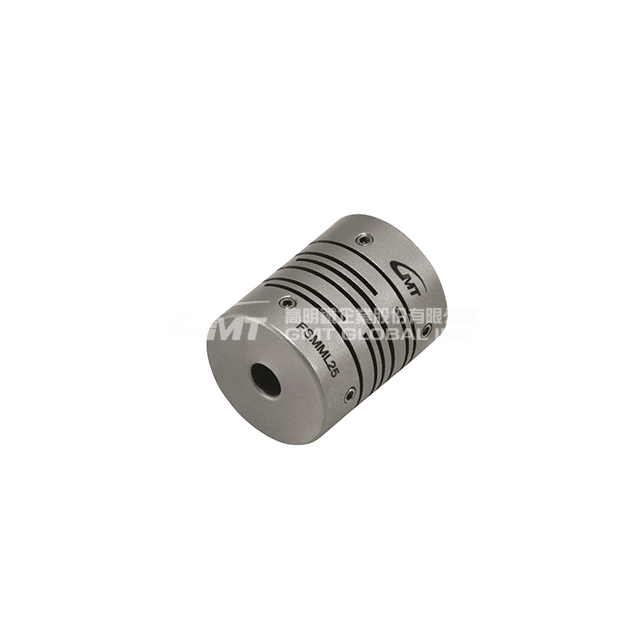
FSMML25
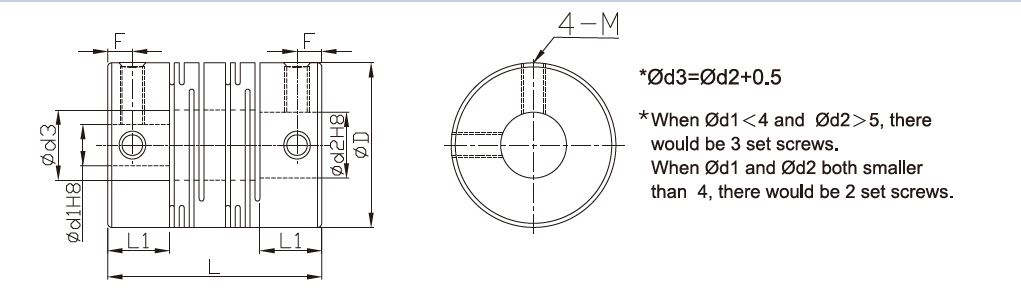
★ Flexible coupling – Spiral beam type – Set screw fixing – Long type.
★ Zero rotation backlash.
★ The flexure allowed by the beam portion of the coupling is capable of accommodating angular, parallel, and axial misalignment.
★ High wrench torque rigidity and sensitivity.
★ Rotation character of clockwise or anti-clockwise is exactly the same.
★ Free maintenance, oil-resist and anti-corrosiveness.
★ Offset of angular, parallel, or axial deviation are individual allowed value, so couple reasons of axial offset appearing at same time would reduce the unit allowable value.
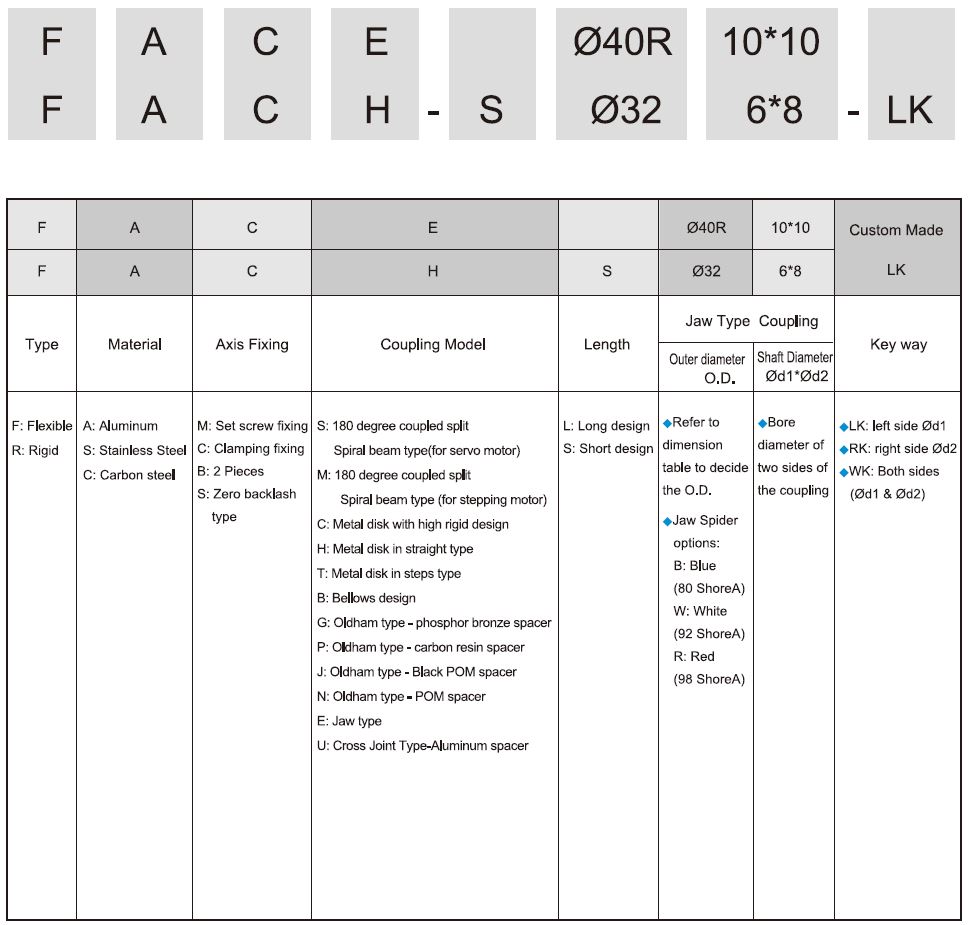
★ The product picture is FSMML25 for reference, please base on below specification for further information.
|
Model No. |
FSMML25 |
||||||||
|
Specification |
Material |
SUS303 | |||||||
|
Accessories |
Nylon set screw | ||||||||
|
ØD |
25 | ||||||||
|
Ød1 |
5 | 6 | 6.35 | 8 | 9.525 | 10 | 12 | ||
|
Ød2 |
6 | 6 / 6.35 / 8 / 10 | 8 / 10 | 8 / 9.525 / 10 / 12 | 10 | 10 / 11 / 12 | 12 | ||
|
L (mm) |
31 | ||||||||
|
L1 (mm) |
8.5 | ||||||||
|
M Rough thread (mm) |
4 | ||||||||
|
F (mm) |
4 | ||||||||
|
Allowable wrench torque (N・m) |
2 | ||||||||
|
Allowable misalignment |
Angular (°) |
2 | |||||||
|
Parallel (mm) |
0.15 | ||||||||
|
Axial (mm) |
± 0.4 | ||||||||
|
Static torsional stiffness (N・m / rad) |
330 | ||||||||
|
Max RPM (r / min-1) |
15000 | ||||||||
|
Moment of Inertia (kg・m2) |
6.8 x 10-6
(Calculated by max. diameter) |
||||||||
|
Screw fixing torque (N・m) |
1.7 | ||||||||
|
Weight (g) |
71
(Calculated by max. diameter) |
||||||||
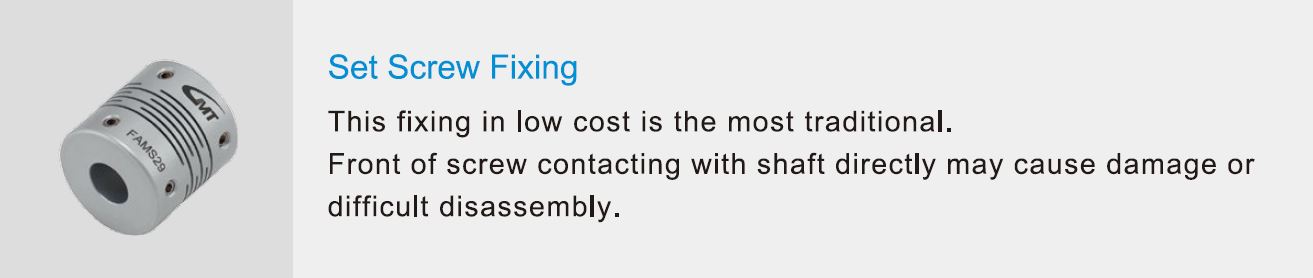
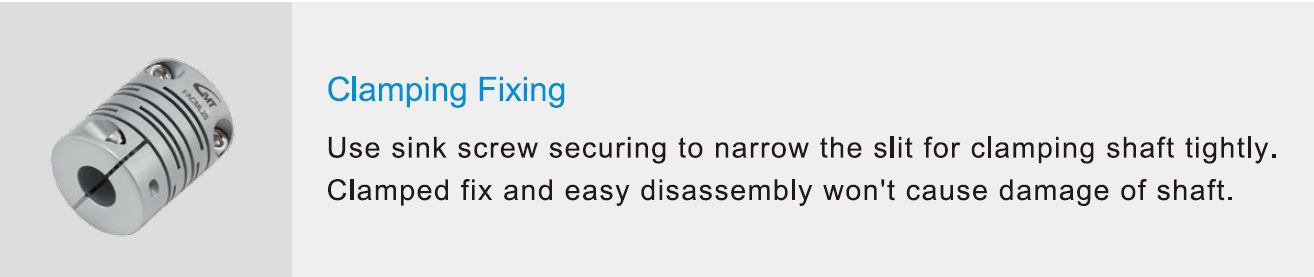
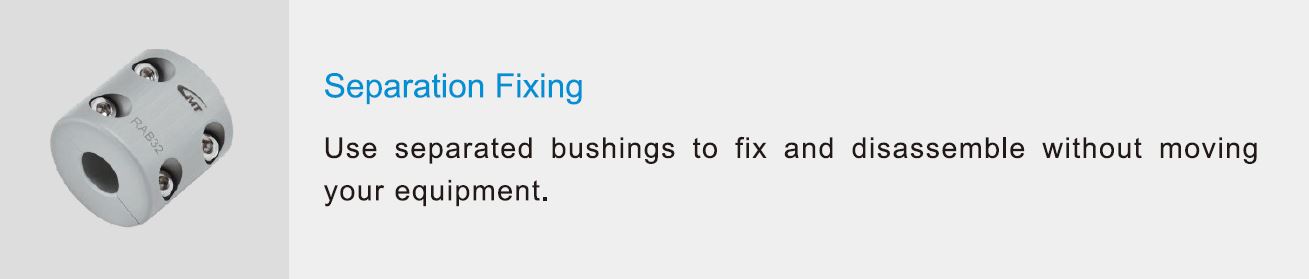
| Coupling fixing |
| (1) There are five ways to fix coupling onto shaft as below. (2) Set screw or clamping screw (hexagonal countersink screw) shall be secured by screw driver or torque wrench. Securing torque refer to product specifications.
|

| Coupling installation |
| ♦ To maintain installation completeness of all kinds of couplings, it’s recommended to install as follow charts to avoid direct contact of two shafts and to have a regular run.
|
| Motor reference |
|
♦ Induction motor (1) More than triple torque occurs in case of running momently. (2) Shaft axis center of the motor has ±1.5mm movement back and forth while running, and it’s not recommended to use spiral beam type. (3) DC motor could be used in working environment with dust.
♦ Stepping motor (1) Without triple torque in case of running momently, but max. rated torque of motor occurs. (2) Larger torque in low speed than servo motor in same level. (3) Higher RPM, smaller torque in motor. (4) Motor have temperature rise in case of running continuously.( to improve by using disk type coupling) * Force output in stepping motor is smaller than servo motor.
♦ Servo motor (1) More than triple torque occurs in case of running momently. (2) Under rated RPM range, cause rated torque. (3) Same torque produce in low speed and high speed. (4) Temperature rise is small in case of running continuously.
♦ Encoder (1) Built-in servo motor, has tiny driven torque. (2) Or connected to stepping motor. (optional) |
Be the first to review “FSMML25”
Related products







Reviews
There are no reviews yet.