





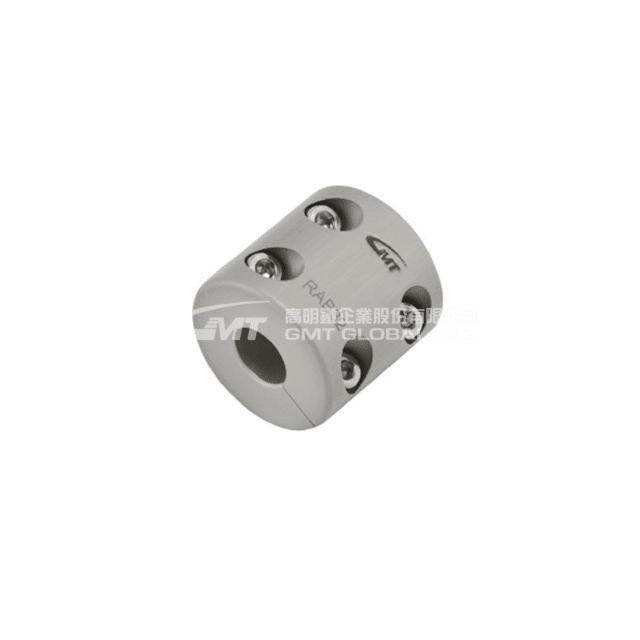
RAB
Rigidity coupling – 2 Pieces – Aluminum alloy – Clamping screw Light, very low inertial and high sensibility. Maintenance free, super anti-oil and corrosion-resistance. Beam type with no allowable offset almost, please show the axis entirely in operating.
| Material | Surface finish | Accessories |
| Aluminum alloy | Anodized | Clamping screw |
| Dimensions | Ød1&Ød2 selection *Ød1≦ Ød2 | Allowable wrench torque | ||||||
| Model no. | ØD | 5 | 6 | 8 | 10 | 12 | 14 | (N.m) |
| RAB | 16 | ‧ | ‧ | 0.3 | ||||
| RAB | 20 | ‧ | ‧ | 0.5 | ||||
| RAB | 25 | ‧ | ‧ | 1 | ||||
| RAB | 32 | ‧ | ‧ | ‧ | 2 | |||
| Introduction |
| ♦ Coupling is a mechanism device, connecting transmission between two shafts and transmitting safety torque.
♦ Coupling divided into “Flexible type” and “Rigidity type”. ♦ To apply flexible couplings timing in case of power transmission, two shafts are not easy to set in alignment, or to simplify two shafts installation. It contains shock buffer to absorb parallelism, deflection, axial displacement, deviation improvement, and improvement of traditional transmission power, so few deviation would not cause any unusual situation on bearing. It is widely applied to current markets. ♦ Rigidity coupling is a unit causing non-eccentric, non-deflection, and make two connected shafts fixed in one unit. Users must do the best to have motor running and axis of load in alignment due to high requirement of concentricity, also means of axis has to be calibrated strictly; otherwise, the rotating shaft would be broken caused by mechanism fatigue, also the bearing would be thermal abrasion due to eccentric load, those were brought by continuous vibration of the axis during long term running of the motor. The advantage of rigidity couplings is to transmit transmission torque precisely. |
Fixing Type |
| ♦ Fixing (1) There are five ways to fix coupling onto shaft as below. Please select coupling as your demand. (2) Set screw or clamping screw (hexagonal countersink screw) shall be secured by screwdriver or torque wrench. Securing torque refer to product specification. ♦ Set screw fixing: ♦ Clamping fixing: ♦ Separation fixing: ♦ Key way fixing: ♦ Zero Backlash type: |
Motor Reference |
| ♦ Induction motor (1) More than triple torque occurs in case of running momently. (2) Shaft axis center of the motor has ±1.5mm movement back and forth while running, and it’s not recommended to use spiral beam type. (3) DC motor could be used in working environment with dust. ♦ Stepping motor ♦ Servo motor ♦ Encoder |
Be the first to review “RAB”
Related products







Reviews
There are no reviews yet.