






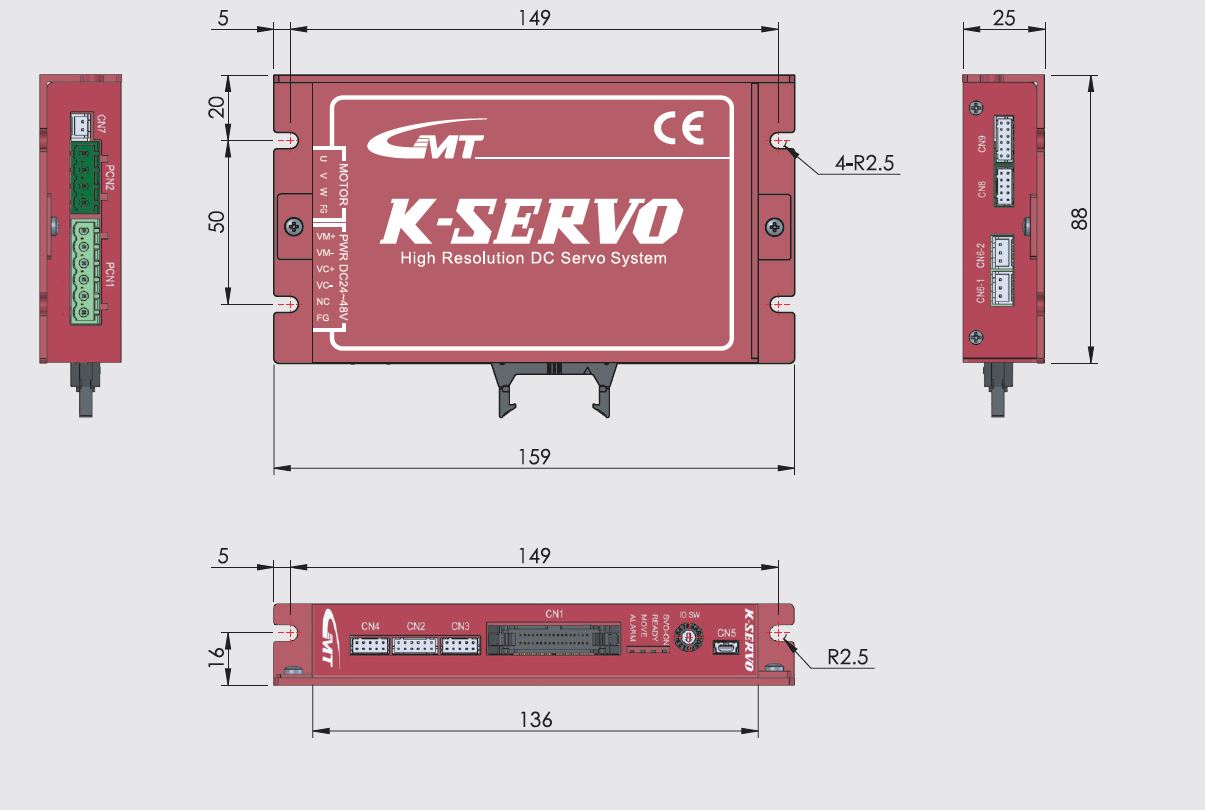
K-SERVO
★ Minimize design:Drive volume is reduced, saving the space of wiring.
★ Low voltage DC input in the range of 24 ~ 48V.
★ Variable control mode:Pulse control mode、Communication control mode、PIO mode.
★ Absolute accuracy correction Error Map function:With optical scale input, corrected by laser interferometer, improving the absolute positioning accuracy.
★ Freedom control:Improving follow-up response and anti-interference.
★ 4 sets of low frequency and 4 sets of notch filter:Improving the issues of noise and vibration.
★DKM Servo Motor Driver:With 23-bit absolute encoder AC servo motor, high resolution and high positioning accuracy.
★DKL Linear Motor Driver:With linear motor and optical scale (ABZ), achieving the requirement of controlling closed loop.
★DKD DD Motor Driver:With 19-bit multi-turn absolute encoder DD motor drive, able to control multi-turn movement and position.
|
Model No. |
K-SERVO |
||
|
Specification |
Power |
Main Loop |
24 ~ 48 VDC ± 15%,Max. Withstand Voltage 60V |
|
Rated Current |
6 Arms | ||
|
Max. Current |
20 Ap,Could be continued aroud 3 sec | ||
|
I / O Power |
24 VDC ± 15% | ||
|
Operating Environment |
Temperature |
Operating:0 ~ 55°C
Stroage:- 20 ~ 80°C,No Condensation |
|
|
Humidity |
Operating / Stroage:Lower than 90% RH
No Condensation |
||
|
Height |
Lower than 1000 m | ||
|
Vibration |
Lower than 5.88 m / S2,10 ~ 60 Hz
Cannot be used on resonance frequency continuously |
||
|
Control Method |
MOSFET PWM Sinusoidal Wave Drive | ||
|
Encoder Feedback |
RS485 Half Duplex Communication,Support Tamagawa Encoder 2.5 Mbps,Optional Relative System | ||
|
Optical Scale Feedback |
QEP Incremental Encoder | ||
|
Control Signal |
Input |
13 Inputs | |
|
Output |
13 Outputs | ||
|
Special Output |
Brake Relieve Output,Independent Connector CN7 | ||
|
Analog Signal |
Input |
N / A | |
|
Pulse Signal |
Input |
2 Points Input,High Speed Photo-Coupler Input,LINE drive IC AM26C32 | |
|
Output |
Motor Z Phase Open-Collector Output | ||
|
Communication Function |
USB / RS485 |
1:1 with mini USB Interface
1:16 with RS485 Interface |
|
|
Regeneration |
N / A | ||
|
Dynamic Brake |
N / A | ||
|
Control Mode |
(1) Position Control (Pulse)
(2) PIO Program Control |
||
|
Status Display |
4 LED Status Display (PWR,ALM,Ready,Move) | ||
|
Protection Function |
Over Current、Over Voltage、Over Loading、Over Position Deviation、Over Speed、Encoder Error、EEPROM Error | ||
|
Safety Certification |
EN 61800-3 | ||
|
Operating Function |
Position |
Pulse Input |
Linear Driver : 500kpps/4Mpps,Open-Collector : 200kpps |
|
DIO |
7 bit Position Input,128 Internal Position | ||
|
Internal Program |
128 Programmable Step | ||
|
Return to Origin Mode |
4 Types (Finding side after limit、Finding Z phase after limit、Stop、Finding Z phase after stop) | ||
|
Special Function |
Error MAP 128 Points | ||
|
Assistive Function |
Servo tuning, Error History, Joging, Origin search | ||
Be the first to review “K-SERVO”
Related products








Reviews
There are no reviews yet.